E
eistee88
- Beiträge
- 4
Hallo liebes Elektrikforum,
ich bin neu hier und habe direkt eine Frage an euch/Sie.
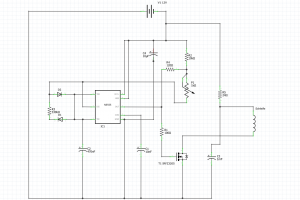
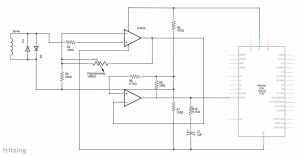
iIm Rahmen eines meiner Unterrichtsfächer (13. Klasse, berufliches Gymnasium Technik) führen wir eine Projektarbeit mit freier Projektwahl durch. Ein Kumpel und ich haben und vorgenommen, den Prototyp eines Rasenmäher Roboters zu entwickeln. Wie das auch in käuflich erwerbbaren Robotern der Fall ist, möchten wir den Arbeitsbereich des Roboters mit einer Induktionsschleife, also einem Schwingkreis mit einwindiger Spule eingrenzen. Die Idee ist es, eine Spule mit Eisenkern als Sensor zu verwenden und die bei Ännäherung an den Schwingkreis in der Spule induzierte Spannung zur Erkennung der Grenze zu verwenden. (Die Spule stammt aus einem Printrelais. Die Sensorschaltung (Bild angehängt) besteht im eigentlichen Sinne nur aus einem nicht-invertierenden OPV und einem invertierenden Schmitt-Trigger, um das Signal erst zu verstärken und dann mit Hilfe des S.-Triggers für den verwendeten Arduino erkennbar zu machen. Das hat in der Theorie auch gut funktioniert. Nun arbeiten wir schon seit etwa einem halben Jahr an unserem Projekt und haben es nun endlich fertig gebracht den Roboter zusammenzubauen. Bei unseren letzten Test ist uns jedoch aufgefallen, dass unsere Detektorspule zu empfindlich ist und den Schwingkreis so schnell erkennt, dass ein normales Fahren des Roboters nicht möglich ist. Trifft der Roboter auch die Induktionsschleife "fährt er sich fest". (im angehängten Video zu sehen) Er kommt dann nicht mehr dazu grade Bahnen zu ziehen, da er ständig das Signal des Schwingkreises empfängt. Ein Lösungsansatz war ein Spannungsteiler aus einem 100k Poti für die in der Spule induzierte Spannung. Das hat jedoch zu wenig befriedigenden Ergebnissen geführt. Nun meine Frage. Hat jemand eine Idee, wie sich dieses Problem lösen ließe? Im Prinzip suchen wir nach einer Möglichkeit die Induktivität unserer Spule einzuschränken. Weitere Angaben zum Roboter kann ich gerne nachreichen. ich freue mich auf hilfreiche Beiträge.")
Ich bin mir übrigens nicht sicher, ob das Thema im Bereich Hausaufgaben richtig ist.
Sensorschaltung:
https://www.bilder-upload.eu/bild-96b0c3-1550001494.png.html
Schwingkreis:
https://www.bilder-upload.eu/bild-318bc4-1550001068.png.html
Fahrverhalten:
ich bin neu hier und habe direkt eine Frage an euch/Sie.
iIm Rahmen eines meiner Unterrichtsfächer (13. Klasse, berufliches Gymnasium Technik) führen wir eine Projektarbeit mit freier Projektwahl durch. Ein Kumpel und ich haben und vorgenommen, den Prototyp eines Rasenmäher Roboters zu entwickeln. Wie das auch in käuflich erwerbbaren Robotern der Fall ist, möchten wir den Arbeitsbereich des Roboters mit einer Induktionsschleife, also einem Schwingkreis mit einwindiger Spule eingrenzen. Die Idee ist es, eine Spule mit Eisenkern als Sensor zu verwenden und die bei Ännäherung an den Schwingkreis in der Spule induzierte Spannung zur Erkennung der Grenze zu verwenden. (Die Spule stammt aus einem Printrelais. Die Sensorschaltung (Bild angehängt) besteht im eigentlichen Sinne nur aus einem nicht-invertierenden OPV und einem invertierenden Schmitt-Trigger, um das Signal erst zu verstärken und dann mit Hilfe des S.-Triggers für den verwendeten Arduino erkennbar zu machen. Das hat in der Theorie auch gut funktioniert. Nun arbeiten wir schon seit etwa einem halben Jahr an unserem Projekt und haben es nun endlich fertig gebracht den Roboter zusammenzubauen. Bei unseren letzten Test ist uns jedoch aufgefallen, dass unsere Detektorspule zu empfindlich ist und den Schwingkreis so schnell erkennt, dass ein normales Fahren des Roboters nicht möglich ist. Trifft der Roboter auch die Induktionsschleife "fährt er sich fest". (im angehängten Video zu sehen) Er kommt dann nicht mehr dazu grade Bahnen zu ziehen, da er ständig das Signal des Schwingkreises empfängt. Ein Lösungsansatz war ein Spannungsteiler aus einem 100k Poti für die in der Spule induzierte Spannung. Das hat jedoch zu wenig befriedigenden Ergebnissen geführt. Nun meine Frage. Hat jemand eine Idee, wie sich dieses Problem lösen ließe? Im Prinzip suchen wir nach einer Möglichkeit die Induktivität unserer Spule einzuschränken. Weitere Angaben zum Roboter kann ich gerne nachreichen. ich freue mich auf hilfreiche Beiträge.
Ich bin mir übrigens nicht sicher, ob das Thema im Bereich Hausaufgaben richtig ist.
Sensorschaltung:
https://www.bilder-upload.eu/bild-96b0c3-1550001494.png.html
Schwingkreis:
https://www.bilder-upload.eu/bild-318bc4-1550001068.png.html
Fahrverhalten: